TLcontrol: Trajectory and Language Control for Human Motion Synthesis



Abstract
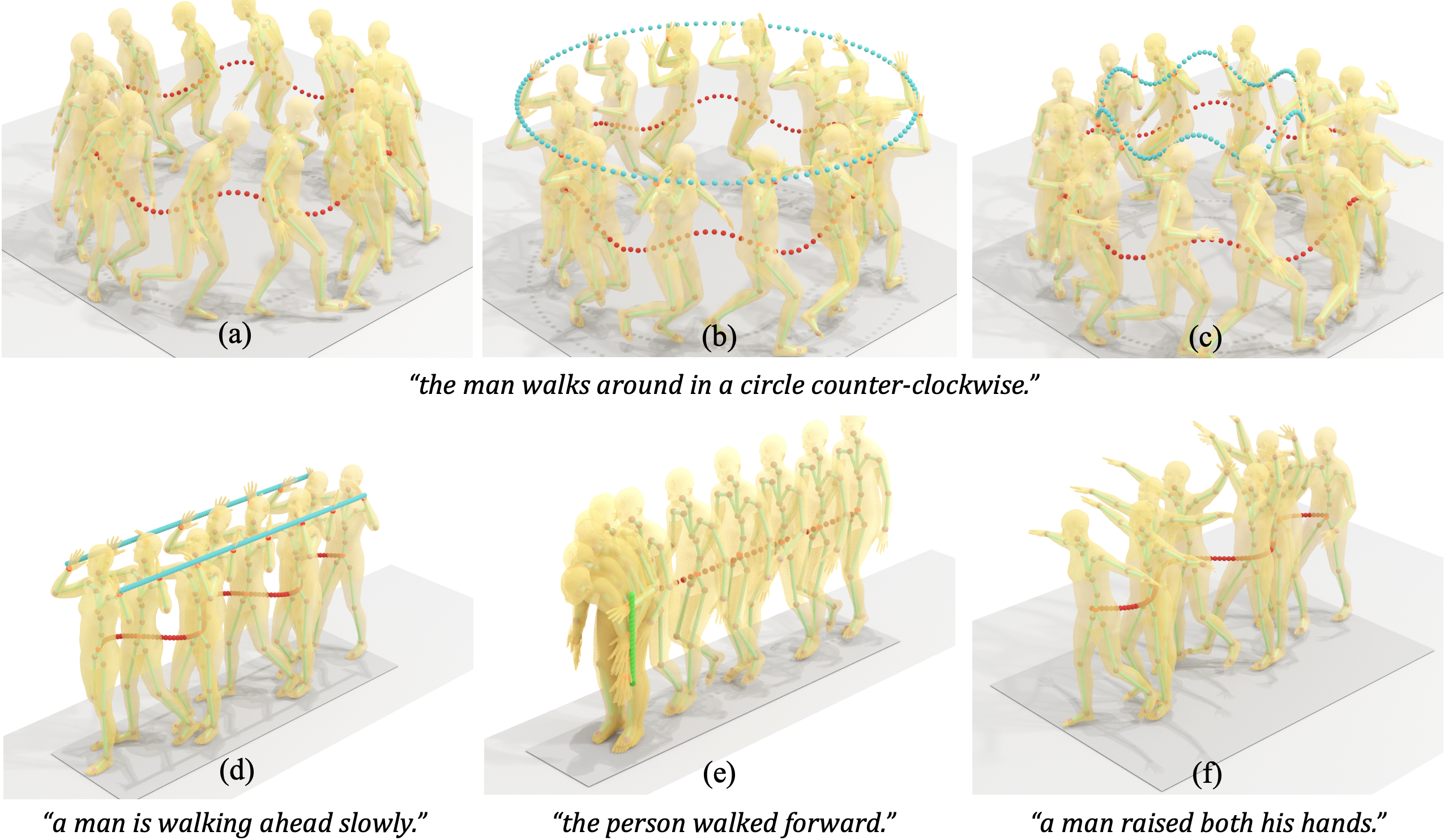
Controllable human motion synthesis is essential for applications in AR/VR, gaming, movies, and embodied AI. Existing methods often focus solely on either language or full trajectory control, lacking precision in synthesizing motions aligned with user-specified trajectories, especially for multi-joint control. To address these issues, we present TLControl, a new method for realistic human motion synthesis, incorporating both low-level trajectory and high-level language semantics controls. Specifically, we first train a VQ-VAE to learn a compact latent motion space organized by body parts. We then propose a Masked Trajectories Transformer to make coarse initial predictions of full trajectories of joints based on the learned latent motion space, with user-specified partial trajectories and text descriptions as conditioning. Finally, we introduce an efficient test-time optimization to refine these coarse predictions for accurate trajectory control. Experiments demonstrate that TLControl outperforms the state-of-the-art in trajectory accuracy and time efficiency, making it practical for interactive and high-quality animation generation.
Qualitative Results
Qualitative Comparision Results
Demo Video
Citation
@article{wan2023tlcontrol,
title={TLControl: Trajectory and Language Control for Human Motion Synthesis},
author={Wan, Weilin and Dou, Zhiyang and Komura, Taku and Wang, Wenping and Jayaraman, Dinesh and Liu, Lingjie},
journal={arXiv preprint arXiv:2311.17135},
year={2023}
}
Page last updated